2.2 色彩空间与HSV原理
RGB的局限性
RGB色彩空间对光照变化敏感,在网球识别中表现不佳。因此我们使用HSV色彩空间。
HSV色彩空间
- Hue(色调):颜色类型,0-180°(在OpenCV中)
- Saturation(饱和度):颜色纯度,0-255
- Value(明度):颜色亮度,0-255
HSV空间更接近人类对颜色的感知,对光照变化不敏感。
项目中的HSV处理
在mycv/color.py中实现:
class ColorDetector:
def __init__(self, lower_hsv, upper_hsv, min_area=300, max_area=10000):
# 初始化HSV阈值范围
self.lower = np.array(lower_hsv)
self.upper = np.array(upper_hsv)
self.min_area = min_area
self.max_area = max_area
# 创建形态学操作核
self.kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
def process(self, frame):
# 高斯模糊减少噪声
blurred_img = cv2.GaussianBlur(frame, (5, 5), 0)
# 中值滤波进一步减少噪声
median_blur = cv2.medianBlur(blurred_img, 5)
# 转换为HSV颜色空间
hsv = cv2.cvtColor(median_blur, cv2.COLOR_BGR2HSV)
# 创建颜色掩膜
mask = cv2.inRange(hsv, self.lower, self.upper)
# 形态学操作(消除噪声)
mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, self.kernel, iterations=1)
ma = mask # 保存中间结果
# 形态学操作(填充孔洞)
mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, self.kernel, iterations=3)
mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, self.kernel, iterations=2)
mask = cv2.GaussianBlur(mask, (5, 5), 0)
# 查找轮廓
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
data = []
processed_frame = frame.copy()
# 处理每个检测到的轮廓
for cnt in contours:
area = cv2.contourArea(cnt)
perimeter = cv2.arcLength(cnt, True)
# 避免除零错误
if perimeter == 0:
continue
circularity = 4 * np.pi * area / (perimeter * perimeter)
# 过滤条件:面积和圆形度
if area > self.min_area and area < self.max_area and circularity > 0.8:
x, y, w, h = cv2.boundingRect(cnt)
center_x = x + w // 2
center_y = y + h // 2
# 计算网球在图像中的比例
ratio = (h / frame.shape[0]) * (w / frame.shape[1])
# 在图像上标记网球
cv2.rectangle(processed_frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.circle(processed_frame, (center_x, center_y), 5, (0, 0, 255), -1)
cv2.putText(processed_frame, f"Ball:({center_x}, {center_y})",
(center_x - 60, center_y - 20), cv2.FONT_HERSHEY_SIMPLEX,
0.5, (255, 255, 255), 2)
# 添加网球数据
data.append([x, y, w, h]) # 项目中存储边界框而非Calculate对象
return processed_frame, ma, data # 返回原始掩膜和处理后图像
| 处理前 | 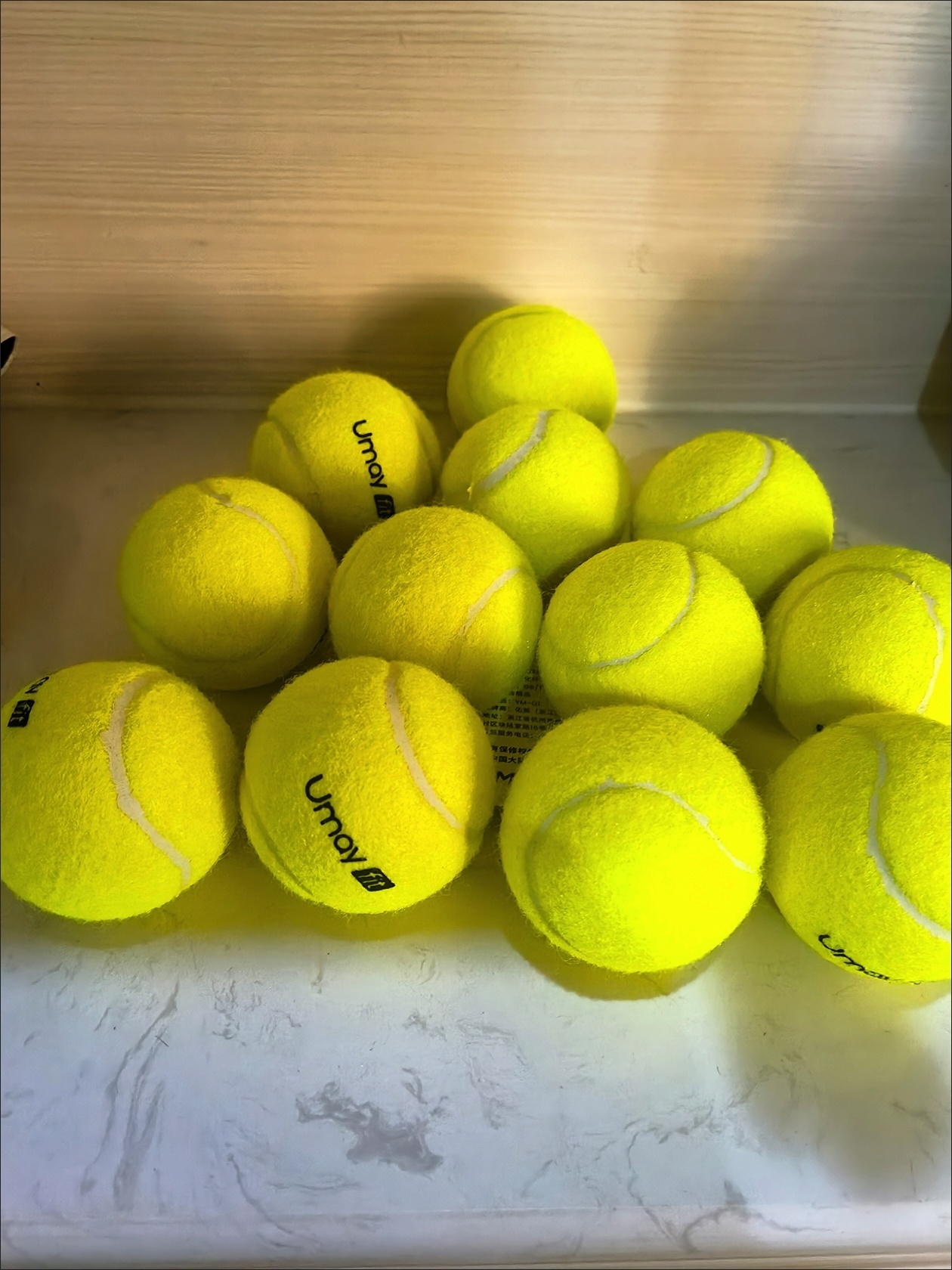 |
|---|---|
| HSV下限: [20, 100, 100] HSV上限: [30, 255, 255] |  |
| HSV下限: [20, 100, 70] HSV上限: [30, 255, 285] | 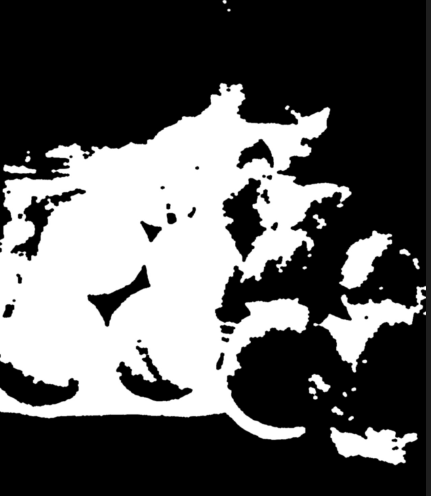 |
| HSV下限: [30,70,80] HSV上限: [50,255,255] | 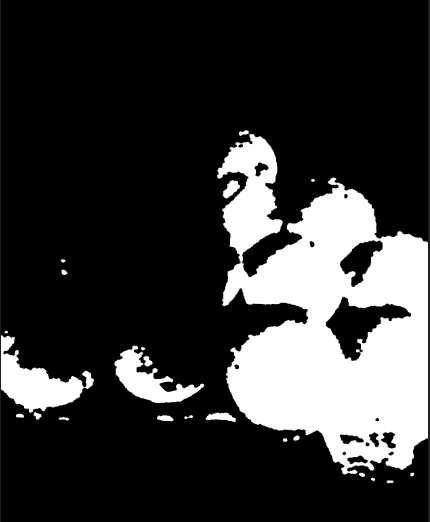 |