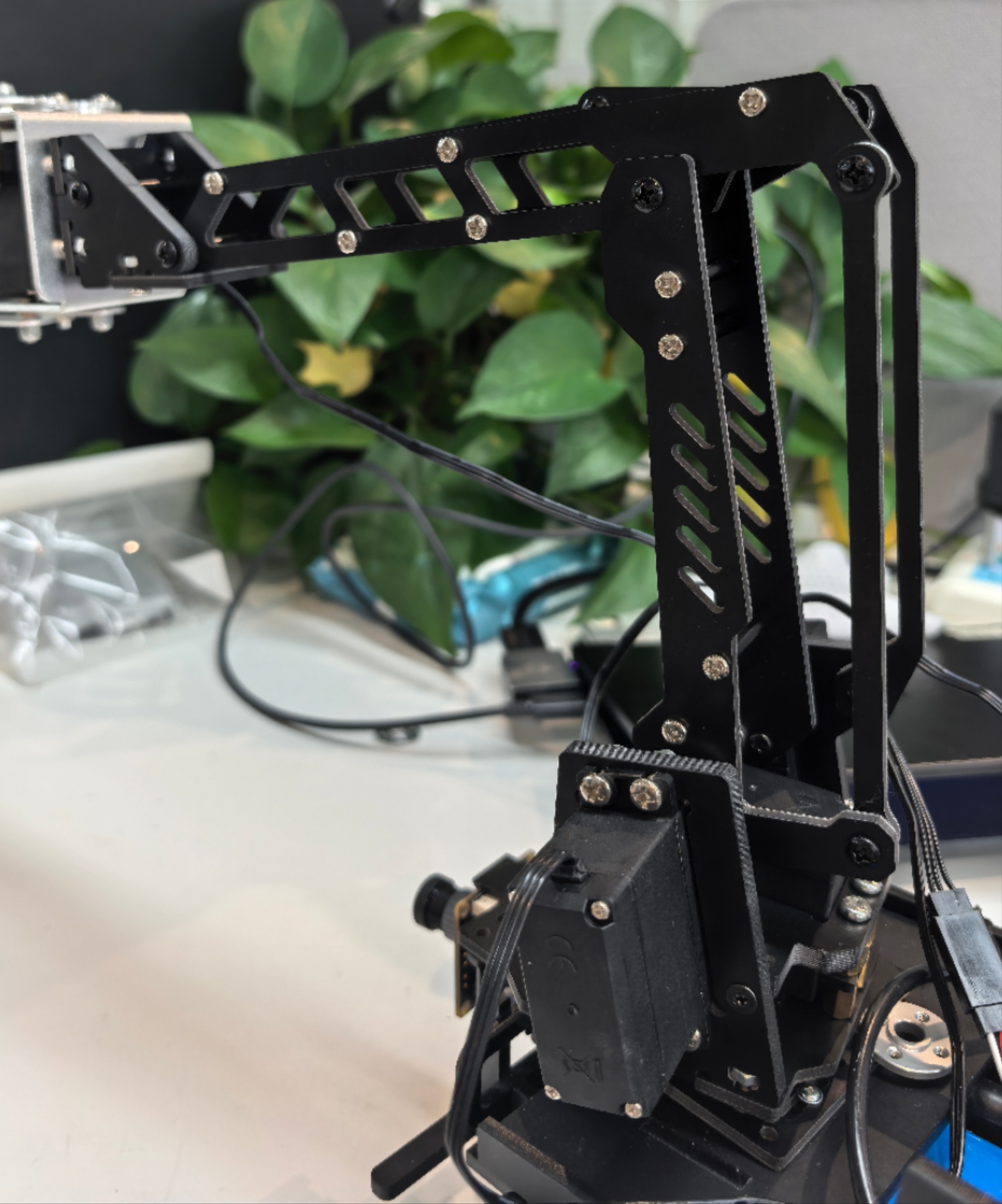
5.1 机械臂结构分析
4自由度机械臂设计
在项目中,机械臂采用4自由度设计,这种结构在灵活性和复杂度之间取得了良好平衡。机械臂的四个自由度分别为:
- 基座旋转关节(0-180°):控制整个机械臂的水平旋转
- 肩关节(0-90°):控制大臂的俯仰运动
- 肘关节(0-120°):控制小臂的俯仰运动
- 腕关节(0-180°):控制末端执行器的方向
工作空间分析: 机械臂的工作空间是一个半球形区域,半径约30cm,高度范围15-45cm。这种设计特别适合地面网球捡拾任务,能够覆盖机器人周围的大部分区域。
舵机控制通过PCA9685模块实现:
# motor/Motor.py
class PCA9685Motor(traitlets.HasTraits):
def set_servo_angle(self, angle):
"""设置舵机角度"""
min_pulse = 150
max_pulse = 2500
angle = max(0, min(180, angle)) # 限制角度在0-180度之间
pulse_width = int((angle / 180.0) * (max_pulse - min_pulse) + min_pulse)
duty_cycle = (pulse_width / 20000) * 4096 # 将脉冲宽度转换为占空比
return int(duty_cycle)
def set_servo(self, channel, angle1):
"""设置舵机角度到指定通道"""
Duty_channel1 = self.set_servo_angle(angle1)
# 设置PWM到指定通道
self.set_channel_pwm(channel, 0, Duty_channel1)
def set_channel_pwm(self, channel, on_value, off_value):
"""设置单个通道的PWM值"""
self.bus.write_byte_data(
self.PCA9685_ADDRESS, self.LED0_ON_L + 4 * channel, on_value & 0xFF
)
self.bus.write_byte_data(
self.PCA9685_ADDRESS, self.LED0_ON_L + 4 * channel + 1, on_value >> 8
)
self.bus.write_byte_data(
self.PCA9685_ADDRESS, self.LED0_ON_L + 4 * channel + 2, off_value & 0xFF
)
self.bus.write_byte_data(
self.PCA9685_ADDRESS, self.LED0_ON_L + 4 * channel + 3, off_value >> 8
)
机械臂预设位置
在项目中定义了多个预设位置:
# motor/Motor.py
class PCA9685Motor(traitlets.HasTraits):
def __init__(self, d1, d2, d3, d4):
# ...初始化代码...
self.release_angle1 = 90 # 初始位置1
self.release_angle2 = 87 # 初始位置2
def traffic_light_release(self):
"""机械臂释放位置"""
self.set_servo(12, self.release_angle1)
self.set_servo(13, self.release_angle2)
def servo_follow(self):
"""跟随位置"""
self.set_servo(12, 100)
def servo_poss(self):
"""拾取位置"""
self.set_servo(12, 40)
def servo_map(self):
"""地图位置"""
self.set_servo(12, 105)