5.2 抓取机构设计
串口控制协议
机械臂通过串口指令控制:
# color_detect.py
def execute_cmd(cmd):
global ser
# ...其他命令处理...
elif cmd == 'catch': # 抓取指令
global cap
motors.Stop() # 停止底盘运动
cap.release() # 释放摄像头资源
ser.write(b'@u \n') # 发送上升指令
time.sleep(6) # 等待上升完成
ser.write(b'@d \n') # 发送下降指令
time.sleep(8) # 等待下降完成
cap = cv2.VideoCapture(0) # 重新打开摄像头
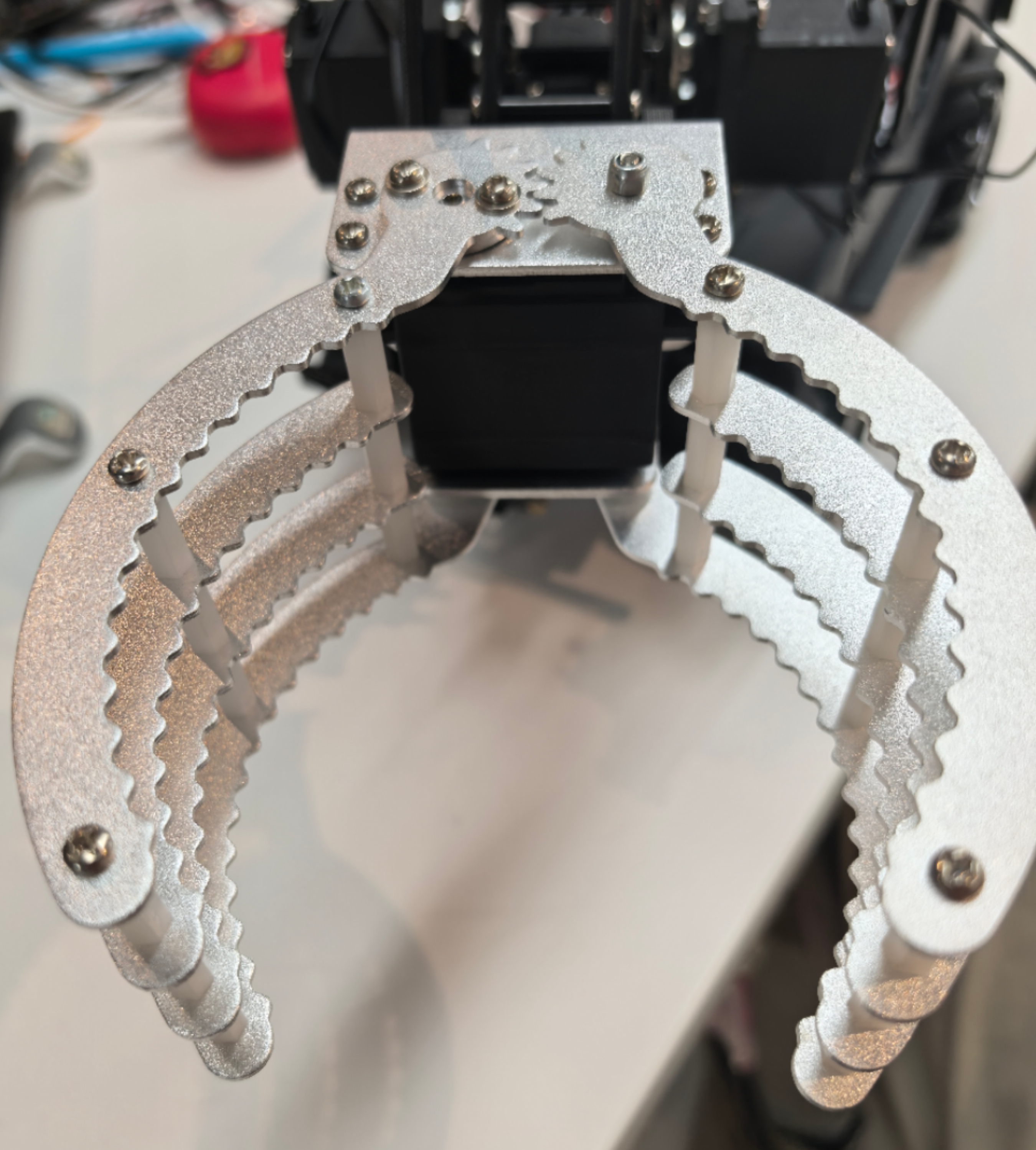
夹持机构力学分析
在项目中,夹爪采用双指平行夹持设计,具有以下特点:
- 自适应抓取:弹簧预紧机构使夹爪能适应不同尺寸网球
- 力控制:通过限位开关实现抓握力控制
- 防滑设计:夹爪内侧采用锯齿增加摩擦力
力学模型:
抓握力F = k × Δx
其中:
k - 弹簧刚度系数
Δx - 弹簧压缩量
抓取动作在test()函数中实现:
抓取动作序列
抓取动作在test()函数中实现:
python
# color_detect.py
def test():
# ...初始化代码...
ball_count = 0
times_count = 0
WIDTH_THRESHOLD = 150 # 抓取触发宽度阈值
WIDTH_DEVIATION = 10 # 宽度容差
while True:
# ...图像处理...
for xywh in data[:1]: # 只处理第一个检测到的网球
width = int(xywh[2])
# 判断是否满足抓取条件
if abs(width - WIDTH_THRESHOLD) <= WIDTH_DEVIATION:
ball_count += 1
if times_count == 0:
times_count = 1
# 当满足条件次数达到阈值时触发抓取
if times_count > 0:
times_count += 1
if times_count >= 100: # 100帧计数
if ball_count >= 70: # 70%以上帧数满足条件
execute_cmd('catch') # 执行抓取
# 重置计数器
ball_count = 0
times_count = 0