硬件接线
接线示意
主控接口图
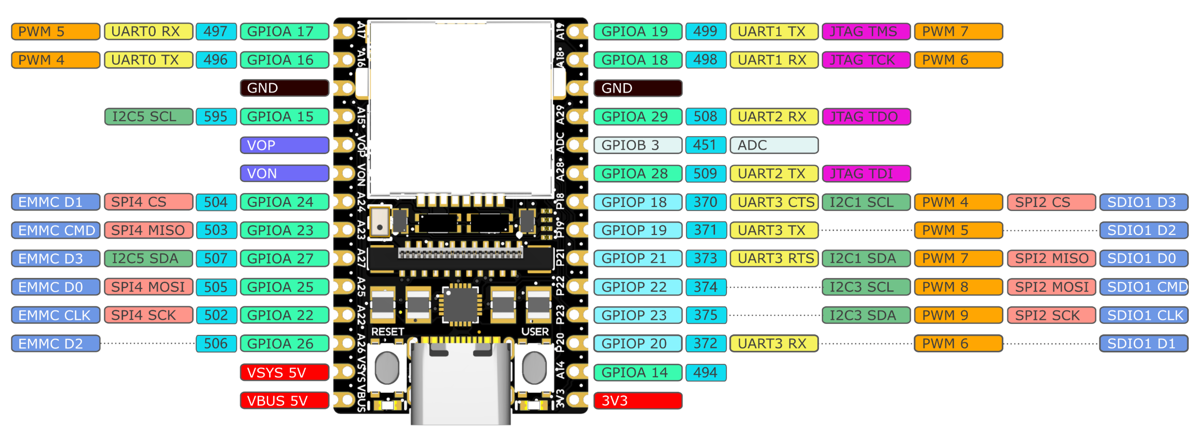
本项目使用了以下接口:
- 电机控制
- A16:PWM4
- A17:PWM5
- A18:PWM6
- A19:PWM7
- 舵机控制
- A28:UART2TX
- A29:UART2RX
- VBUS 5V
- GND
底盘控制板接口图
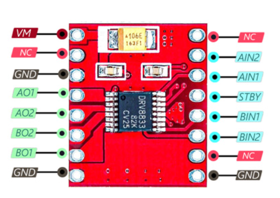
- VM:电机供电
- NC:置空
- GND:接地
- A、BO1、2:接电机
- A、BIN1、2:控制信号输入
- STBY:SLEEP控制,底电平有效
机械臂控制板接口图
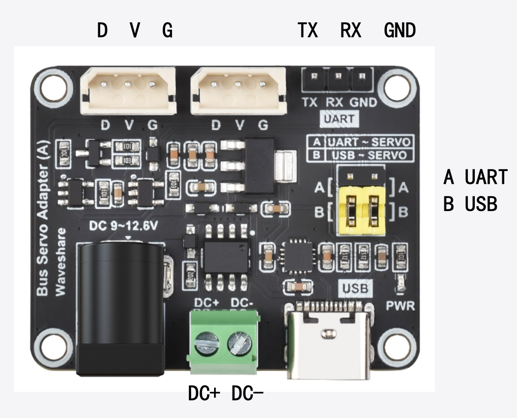
- D:数据总线
- V:舵机供电正级
- G:舵机接地
- DC+:主控供电正级
- DC-:主控供电负极
- TX:控制输入
- RX:控制接收
- GND:接地
- A UART:UART总线控制模式
- B USB:USB总线控制模式
控制电路连线图
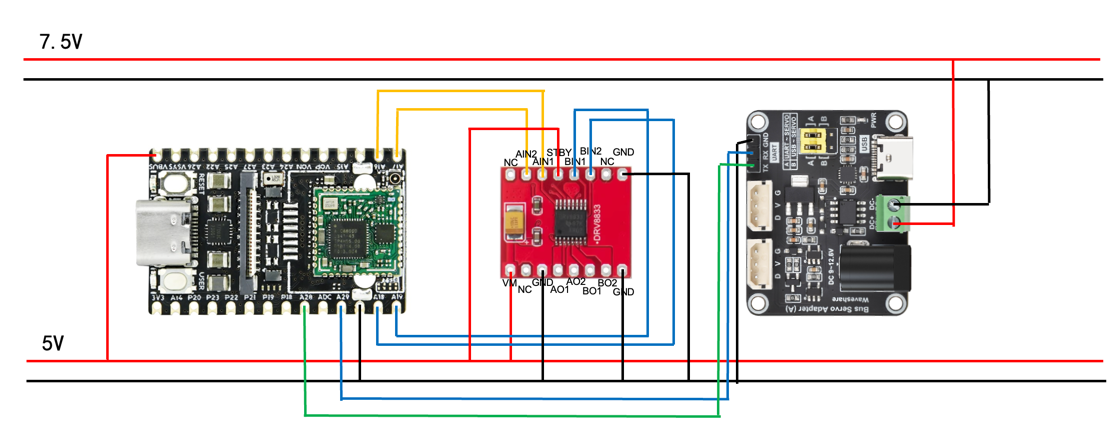 接线前请确保断电操作。
接线前请确保断电操作。
机械臂UART控制
- 机械臂串口连接至
/dev/ttyACM0 - 波特率:115200
电机PWM控制
| 电机 | PWM Chip | Channel |
|---|---|---|
| 左电机 | 4 | 0, 1 |
| 右电机 | 4 | 2, 3 |
更多原理图
硬件原理图位于 hardware/ 目录:
LicheeRV_Nano-70418_Schematic.pdf- 主控板原理图sg2000_trm_cn.pdf- SG2000 技术参考手册众灵舵机使用手册-250508.pdf- 舵机使用说明